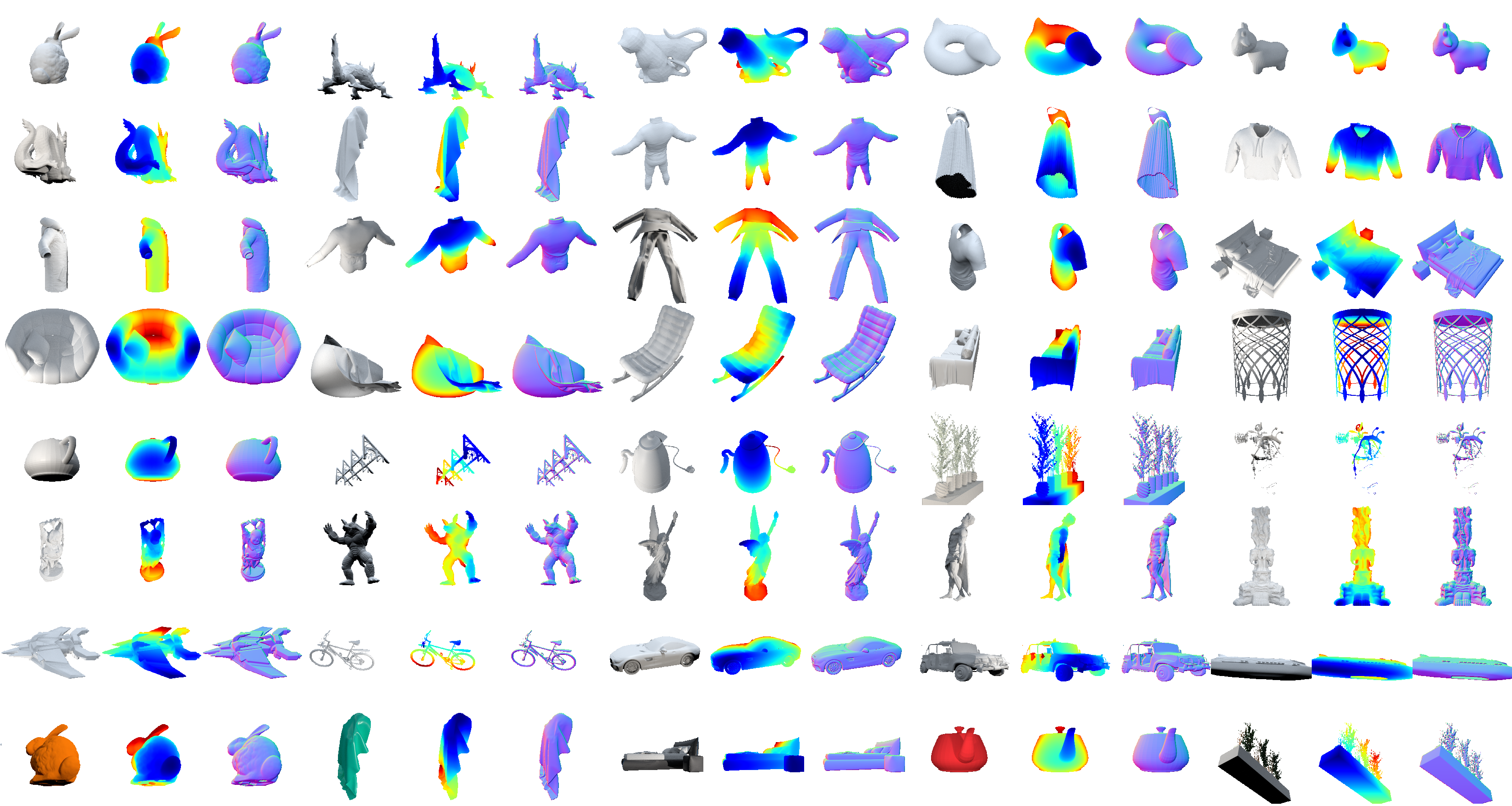
The dataset features several common 3D objects rendered as images in Blender with no textures and different lights. Depth and normal maps are provided.
Abstract
Reconstructing texture-less surfaces poses unique challenges in computer vision, primarily due to the lack of specialized datasets that cater to the nuanced needs of depth and normals estimation in the absence of textural information. We introduce ”Shape2.5D,” a novel, large-scale dataset designed to address this gap. Comprising 1.17 million frames spanning over 39,772 3D models and 48 unique objects, our dataset provides depth and surface normal maps for texture-less object reconstruction. The proposed dataset includes synthetic images rendered with 3D modeling software to simulate various lighting conditions and viewing angles. It also includes a real-world subset comprising 4672 frames captured with a depth camera. Our comprehensive benchmarks showcase the dataset’s ability to support the development of algorithms that robustly estimate depth and normals from RGB images, and perform voxel reconstruction. Our open-source data generation pipeline allows the dataset to be extended and adapted for future research.
TL;DR
We introduce a novel dataset, Shape2.5D:
- For depth and normals estimation on texture-less surfaces
- 302k synthetic frames for 35 3D models
- 62k more synthetic frames for 2600 3D models of 13 common ShapeNet objects
- 4672 real-world frames for 6 clothing and household items
Benchmarks using an encoder-decoder network for depth and normals estimation.
BibTeX
@article{khan2024shape25d,
author={Khan, Muhammad Saif Ullah and Sinha, Sankalp and Stricker, Didier and Liwicki, Marcus and Afzal, Muhammad Zeshan},
journal={IEEE Access},
title={Shape2.5D: A Dataset of Texture-less Surfaces for Depth and Normals Estimation},
year={2024},
volume={12},
number={},
pages={1-1},
doi={10.1109/ACCESS.2024.3492703}
}Maintained by saifkhichi96 on GitHub.
The website is distributed under different open-source licenses. For more details, see the notice at the bottom of the page.